ESP32PICOの機材で、CANコントローラ機能を使えると知り、CAN通信を試してみました。
なお、ESP32におけるCANコントローラは、TWAI(The Two-Wire Automotive Interface) というペリフェラルがCANプロトコルと対応しているようです。
ESP32-PICO-D4のデータシートから、TWAI対応であることが読み取れます。
準備
必要なモノ
実験に必要な機材、ソフトウェアを示します。
Hardware
- M5StickC Plus / M5Stack社
- M5Stack用CAN-BUSユニット(CA-IS3050G)
- USB CAN Module / InnoMaker
- Windows PC
実験
今回試した回路を示します。
ブレッドボードをCANバスとして設定しました。
>
○ CANバスの終端抵抗
- InnoMakerのCAN BUSモジュール側 : ジャンパピンを設定することで、基板上の120Ωの抵抗を有効
- M5Stick側 : M5 CAN-BUS Unitに付属の120Ωのカーボン抵抗をブレッドボードに刺し、有効
○ CAN通信の設定
今回の通信速度(baudrate)は500kbpsとしました。
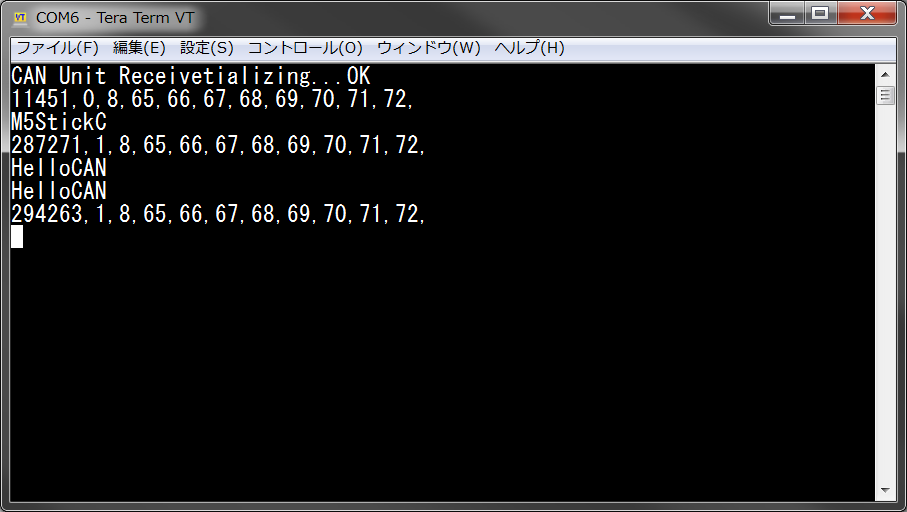
○ 通信確認
- M5StickC側
M5-Product-Example-CodeのCAN受信、CAN送信プログラムを参考にしました。
//Insert CAN Unit to PORT-B,if received message, screen will display #include "M5StickCPlus.h" #include "ESP32CAN.h" #include "CAN_config.h" #define TX_PORT GPIO_NUM_32 // 使用するデバイスのGPIOにあわせてください // この設定は、M5StickC plusのGroveポートを使用した場合の設定です。 #define RX_PORT GPIO_NUM_33 // 使用するデバイスのGPIOにあわせてください // この設定は、M5StickC plusのGroveポートを使用した場合の設定です。 CAN_device_t CAN_cfg; void header(const char *string, uint16_t color) { M5.Lcd.fillScreen(color); M5.Lcd.setTextSize(1); M5.Lcd.setTextColor(TFT_WHITE, TFT_BLACK); M5.Lcd.fillRect(0, 0, 320, 30, TFT_BLACK); M5.Lcd.setTextDatum(TC_DATUM); M5.Lcd.drawString(string, 160, 3, 4); } void setup() { M5.begin(); Serial.begin(115200); M5.Lcd.setRotation(1); Serial.println("CAN Unit Receive"); header("CAN-Bus Receive", BLACK); CAN_cfg.speed=CAN_SPEED_500KBPS; // ここでボーレートを設定します CAN_cfg.tx_pin_id = TX_PORT; CAN_cfg.rx_pin_id = RX_PORT; CAN_cfg.rx_queue = xQueueCreate(10,sizeof(CAN_frame_t)); //start CAN Module ESP32Can.CANInit(); } void loop() { CAN_frame_t rx_frame; CAN_frame_t tx_frame; //キューからCANフレームを受信する if(xQueueReceive(CAN_cfg.rx_queue,&rx_frame, 3*portTICK_PERIOD_MS)==pdTRUE){ Serial.print(millis()); // 受信時間 Serial.print(","); Serial.print(rx_frame.MsgID,HEX); // Msg ID Serial.print(","); Serial.print(rx_frame.FIR.B.DLC); // DLC Serial.print(","); for(int i = 0; i < 8; i++){ Serial.print(rx_frame.data.u8[i],HEX); // CANデータ Serial.print(","); } printf("\n"); }else{ // データを送信します M5.update(); if (M5.BtnB.isPressed()) { tx_frame.FIR.B.FF = CAN_frame_std; tx_frame.MsgID = 1; tx_frame.FIR.B.DLC = 8; tx_frame.data.u8[0] = 'H'; tx_frame.data.u8[1] = 'e'; tx_frame.data.u8[2] = 'l'; tx_frame.data.u8[3] = 'l'; tx_frame.data.u8[4] = 'o'; tx_frame.data.u8[5] = 'C'; tx_frame.data.u8[6] = 'A'; tx_frame.data.u8[7] = 'N'; ESP32Can.CANWriteFrame(&tx_frame); //M5.Lcd.println("Send Message"); Serial.printf("%s\n",tx_frame.data.u8); delay(200); }else if(M5.BtnA.isPressed()){ tx_frame.FIR.B.FF = CAN_frame_std; tx_frame.MsgID = 1; tx_frame.FIR.B.DLC = 8; tx_frame.data.u8[0] = 'M'; tx_frame.data.u8[1] = '5'; tx_frame.data.u8[2] = 'S'; tx_frame.data.u8[3] = 't'; tx_frame.data.u8[4] = 'i'; tx_frame.data.u8[5] = 'c'; tx_frame.data.u8[6] = 'k'; tx_frame.data.u8[7] = 'C'; ESP32Can.CANWriteFrame(&tx_frame); //M5.Lcd.println("Send Message"); Serial.printf("%s\n",tx_frame.data.u8); delay(200); } } }
実験結果
- USB CAN Bus Module側

まとめ
Windows PC、M5StickC plus、M5 CANBUS Unitを使い、CAN通信を行えることを確認しました。